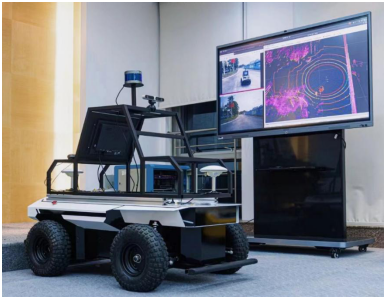
设备名称:自主移动开发试验平台
设备介绍:该设备为一款小型AGV实验平台,实验室在原有平台的基础上进了二次开发,该设备搭载高精建图和定位算法,并具备路径规划、避障以及导航能力。配备车路48V 30AH电池容量,续航5小时,驱动电机功率1000w,最大速度20km/h,最小转弯半径2.5m,最大爬坡10°,最大垂直载重200kg,控制精度1RPM,轴距785mm,轮胎直径360mm,离地高度12cm,驱动方式为阿克曼转向(前转向),制动方式为电机刹车/鼓刹制动。搭载ubutnu18.04系统,可以进行二次的扩展开发,实验室可以根据用户需求进行定制化软件功能的开发。可用于物流配送、园区巡逻、货物搬运等场景,提升作业效率和安全性。
设备技术指标参数:1、搭载高精建图算法;2、搭载车路协同OBU设备;3、搭载Dzlocalization定位算法;4、通信方式:DZCAN;5、智能相机:可直接和工控机通信;6、尺寸:( 带防撞条)1435*860*1205( MM) ;7、编码器类型:DZENCODER(1000线);8、电池容量 48V 30AH ;9、驱动电机:DZMOTER ;10、电机功率:1000w ;11、搭载系统:ubutnu18.04 续航时间5h ;12、最大爬坡(带负载):10;13、底盘自重 :135kg 最小转弯半径:2.5M;14、最大垂直载重 200KG 控制精度:1RPM;15、最大速度:20KM/H 轴距:785MM ;16、轮胎直径:360MM 离地高度 12CM ;17、驱动方式 阿克曼转向( 前转向);18、制动方式 电机刹车/鼓刹制动;19、适用场景 室内外封闭园区 ;20、工作温度 -10-60°;21、悬挂类型 双叉臂独立悬挂/摇摆臂悬挂 ;22、对外供电 5V/12V/24V/48V;23、防护等级 IP54 安全防护 防撞停车/无线急刹驻坡 支持 断电抱闸 支持;25、IMU:DZIMU,可直接输出线速度。
长春理工大学中山研究院未来光场与智慧城市实验室详情链接:
https://zs.cust.edu.cn/kjpt/zykysys/c755323ad9e64a5f89e7c4e58974d611.htm
(联系人:马老师,邮箱:376223524@qq.com)

网站地图 | 联系方式 版权所有:中山市科学技术局 ©2016-2022 kj.zs.gov.cn
联系电话:(0760)88315063 地址:中山市松苑路1号市政府大楼
邮编:528403 粤ICP备14014162号-3 网站标识码:4420000033  粤公网安备 44200002443105号
粤公网安备 44200002443105号